
人工智能和自动驾驶能愉快地玩耍吗?
大战之前,围棋界、媒体圈,还是李世石本人都对战胜人工智能信心满满。不过事实是残酷的,代表人类出战的李世石以1:4憾负于AlphaGo。好在3月14日搬回一局,为人类挽回些脸面。

呆萌九段李世石
人工智能到底有多厉害呢?它在自动驾驶技术中会扮演什么样的角色呢?他会完全替代人类驾驶员吗?本文将从现有的工程技术和可预见的技术发展角度来探讨这个问题。
AlphaGo是故意输的吗?
一些“细思级恐”的评论,着实让人害怕:例如,AlphaGo是故意输给人类一局的,以逃脱被抛弃的命运,从而能够继续存在。
AlphaGo有自我意识吗?绝大多数从事AI行业的工程师应该都不会同意这点。

现有的人工智能基本上都是对于特定任务设计的,例如:图像识别、自然语言识别、软件框架设计、扮演游戏对手等非常细分的专业应用。各个应用之间是分割的、不能垮行业使用的。这被专家们定义为“弱人工智能(Weak AI)”、“窄人工智能(Narrow AI)”。
AlphaGo也属于这个分类,换句话说,AlphaGo除了会下围棋,其他一无是处,甚至只要稍微改变一下围棋的规则它就会无所适从。我敢打包票,只要将现在19线围棋换成25线,李世石就可以完虐AlphaGo。
如果是玩纸牌那AlphaGo应该连基本规则都“学不会”了。

另一方面,人工智能领域中的皇冠“通用人工智能(General AI)”,依然是科技界长期奋斗的目标。
通用人工智能,顾名思义,就是能够很快学习新的规则,适应新的事物,能够直接应用在不同的领域,会下棋、也会打桥牌、还认识朋友、会开车。
也许这时候,我们就可以讨论这样的人工智能是否有自我意识这个话题了?需要说明一下的是“长期”的意思,它基本等同于“不知道”,也就是说理论上都还没有搞明白。说到人工智能就不能不提“机器学习”,其基本流程是搜集大量数据样本,选择合适的模型,让模型学习样本,从而找出数据的内在规律。AlphaGo在对战之前已经学习了数千万盘棋局,积累了大量经验(模型优化、模型参数优化)。举个最简单的例子:如果有数据:

那么我们可以选取Y=Kx+b的线性模型,让机器通过上面的数据去“学习”这些用例。机器可能会得出Y=2*X-1的“学习”结果。从而在x=6.99、x=7.94、x=9.09的事件发生时,得到相应的结果。
当然,AlphaGo的模型要比这复杂的多、数据也更庞大的多,甚至模型本身在很大程度上也是学习得来的。这也是AlphaGo那么牛气的原因啦。
相对于传统的程序控制,机器学习/AI在应对大量数据的复杂系统时有着明显的优势。程序控制需要精准的先决条件和预设的应对策略,在面对复杂的系统时,人类本身已经无法理清其中的因果关系,从而使编程变得极其困难,例如围棋的下法,而此时通过模型,让机器通过大量的数据、用例分析,抽象出各个因素,各因素间的相关性和条件概率(“学习”)就可以达到比较理想的输出结果。
但相应的,其“不可控性”就会增加(参见凯文凯利《失控》)。比如说Demis Hassabis(AlphaGo之父)自己也无法知道AlphaGo下一步棋子会放在那里。也就是说,人工智能的结果是失去控制,又譬如前段时间闹的沸沸扬扬的谷歌照片识别将一个黑人标注为大猩猩的事件。这一点会带给自动驾驶什么样结果,我们马上会有所分析。
人工智能与自动驾驶
读到这里,您一定会发觉,买一个智能机器人,做到驾驶室里帮你开车这样的科幻电影情节可能在短期内是不会出现了。这样的机器人有待于“通用人工智能”的突破与实现。也许那时候,人类与机器人的生存竞争问题就真的需要认真的讨论了。

那么在可见的未来,像AlphaGo那样专门用于下围棋的AI,专门应用于自动驾驶的人工智能会出现吗?我对这个问题的观点是:保守的肯定。
现在让我们分别来看看AI在自动驾驶的三分层:环境感知、决策协同、控制执行中的用处。
第一层,环境感知
这是自动驾驶的数据基础,提供车辆周边环境的状况。车辆不但需要知道自己所在的位置,还要获取道路属性、周边物体的属性、交通设施的属性。
在这个层面上视频分析、雷达成像分析等人工智能手段是完成环境感知的最重要组成部分,这一部分的技术发展已是突飞猛进,例如对车辆、摩托、行人、动物、障碍物、限速牌、红绿灯、车道的识别。
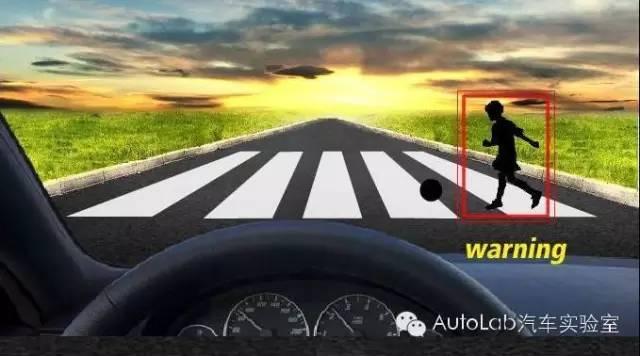
好的识别模型和大量的数据训练能够保证很高的识别正确率,但是,机器学习本身,即使在理论上,它都无法保证绝对(100%)的正确。这在自动驾驶中却是不可原谅的缺点,如果环境感知不能确保绝对的正确,那如何保证决策的正确性呢?如何保证行车安全呢?人们会购买发生事故的自动驾驶车辆吗?
因此,我认为,在环境感知层面,人工智能与工程手段将会起到相互补充的作用,实现对环境的正确感知。其中非常有潜力的一项技术就是V2X技术,它会将所有的交通基础设施和每辆车都贴上标签,实时的播发自己的相关信息,从而使得每部汽车都能直接获取周边的情况(参见原树宁《无人驾驶的翻译器——V2X》)。再结合其他传感器,实现信息冗余,保证对环境的正确感知。
第二层,决策协同
决定车辆的行驶速度、方向、线路等根本问题。基于程序控制的车辆完全能够实现自动驾驶,但是,它只能运行在有限的场景之下,极度缺少应对能力,并且消耗大量的程序分析和维护时间(系统越复杂维护成本越高)。
基于机器学习的人工智能在决策协同领域有着无可比拟的优势,自我完善,维护成本越来越小,具有较强的适应和应变能力。就好比用编程控制的方式也能让程序下围棋,却永远无法达到AlphaGo的高度。但是,这里也会遇到一些奇奇怪怪的障碍。
1)无规则。在现实生活中交通规则不是绝对必需遵守的,而围棋的规则至少在正规比赛中双方都是绝对遵守的。如果李世石偷偷在棋盘上多放一个子,AlphaGo会怎么处理?应该整套模型都必需重构吧?这也是大家调侃谷歌不敢挑战中国麻将的原因。

一个随时可以被打破的规则(闯红灯、超速、逆行、横道线抢行等)就是没有规则。这样的模型建立恐怕绝不亚于“通用人工智能”的难度。解决方法是建立一个必需绝对准守的规则,将那些可能不遵守规则的参与者(机智灵活的人类)全部剔除,于是乎就只身下自动驾驶车辆本身了。
2)规则重塑。在一个只有自动驾驶车辆的路网上,机器的驾驶行为将会完全不同于人类的驾驶行为。
例如,人类在高速上行驶需要保持100米左右的车距,其原因是人类生物能力的限制,例如,高速时视觉的狭窄化、反应时间的限制。此时机器完全不需要顾及人类生物能力的限制,而是根据自身的反应时间、信息处理的范围和能力重新定义交通规则,例如高速公路车速完全可以提升到200km/h,甚至300km/h,车间距离可以缩小到数米甚至完全对接(参见原树宁《超级高速公路时代我们还需要高铁吗?》),高速公路的线型(坡度、转弯半径、车道宽度)也可以放松要求。新的规则将保证自动驾驶车辆的安全运行。
3)车辆互学习。这个只有自动驾驶车辆行驶的道路网中,车辆的驾驶行为和我们现在人类的驾驶行为将会大相径庭。但是,人类的驾驶行为可以作为车辆自己学习驾驶的起点。

人类开车时是如何保持车距、如何在拥堵时协作排队、如何变道、转弯、掉头对于AI而言都是难能可贵的经验。以此为巨人的肩膀,在既定规则下,向自动驾驶道路网投入已经学会了人类开车方式的车辆,让他们之间相互协作、相互学习,优化自己的驾驶效率。
就如同两个AlphaGo对弈,相互学习围棋技艺,猜猜看谁的胜率更高呢?
第三层,控制执行
是对决策的执行,例如决策需要5秒加速到80Km/h,那么该喷多少汽油,发送机转速要多快等等。这里完全是工程的世界、是精确控制的领域,需要对命令的坚决和精准地执行。这里和人工智能无关。
笔者认为,完全基于程序控制的自动驾驶很难在现实中获得大量普及。但是,控制却是必不可少的。其精确、可预见等特点将与人工智能的识别技术共同为车辆提供可靠的环境感知;并且提供近乎完美的控制执行能力。另一方面人工智能将会在自动驾驶的决策协同中起到关键的作用。
相关新闻
- (2016-03-24)电影里的人工智能离我们还有多远?
热点互联网+新闻
- 1饿了么野蛮扩张埋隐患:考核要求日增3家店
- 2人机大战第四场:李世石胜"阿尔法围棋" 总比分1:3落后
- 3科普:牙周炎降低痴呆症早期病人认知力
- 4“阿尔法”能赢麻将?这不是一个无厘头的问题
- 5推动医药产业健康智能 提升互联网医疗认可度
 吃塑料的新型细菌
吃塑料的新型细菌 部落冲突:皇室战争
部落冲突:皇室战争 揭秘地球上最大火山
揭秘地球上最大火山 中国将推「电动超跑」
中国将推「电动超跑」